Review of Computer-Aided Sinus Surgery
- Affiliations
-
- 1Hanyang University, Department of Electronic Systems Engineering, Korea. bj@hanyang.ac.kr
- KMID: 2361200
- DOI: http://doi.org/10.7599/hmr.2016.36.4.248
Abstract
- Sinus is a cavity within a bone. Most are commonly found in the bones of the face. Specially, paranasal sinuses are air cavities in the cranial bones, especially those near the nose. They include the frontal sinuses, the ethmoid sinuses, the sphenoid sinuses and the maxillary sinuses. There are many types of sinus disease. They are classified as acute (quick onset) and chronic (over a long period of time). Besides, there are several other types of sinus diseases due to fungus and polyps. Sinus tumors also happen although it is relatively uncommon. Navigation software for general sinus surgery has been developed and are being used in the operation room. However, there are still many blind regions in the sinus area by using conventional straight type endoscope and devices. To cope with such a problem, flexible endoscope and devices are being developed along with advanced navigation algorithms. In this review, many research activities associated with computer-aided sinus surgery are discussed.
Keyword
MeSH Terms
Figure
-

Fig. 1 Sinuses and sinusitis.

Fig. 2 Measured distances from nostril to the landmarks of sinuses, a) from nostril to basal lamella. b) from nostril to posterior wall of ethmoid sinus. c) from nostril to maxillary ostium. d) from nostril to posterior wall of sphenoid sinus.
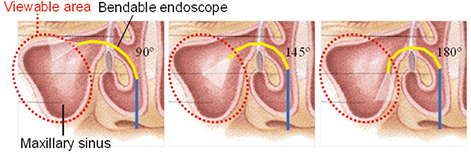
Fig. 3 View range of a bendable endoscope.
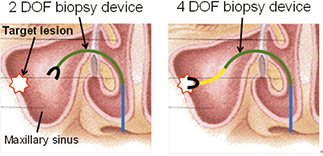
Fig. 4 Comparison of a 2-DOF and a 4-DOF biopsy device

Fig. 5 Design and prototype of the endoscope end-effector

Fig. 6 Design and prototype of the biopsy end-effector
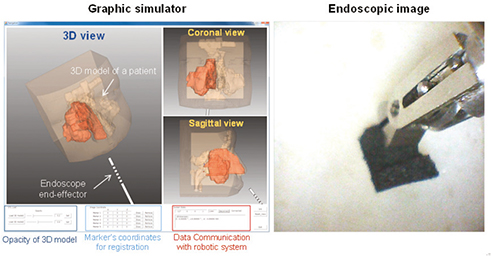
Fig. 7 Navigation software for sinus surgery

Fig. 8 Registration between robot and image coordinate system.

Fig. 9 Typical sinus surgery.
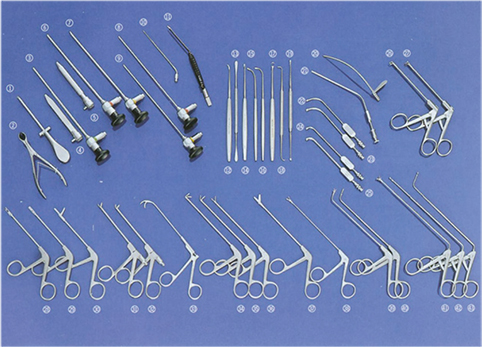
Fig. 10 Surgical devices for sinus surgery
Cited by 1 articles
-
Review of Computer-Aided Surgery
Byung-Ju Yi
Hanyang Med Rev. 2016;36(4):203-204. doi: 10.7599/hmr.2016.36.4.203.
Reference
-
1. Burgner-Kahrs J, Rucker DC, Choset H. Continuum robots for medical applications: a survey. IEEE Trans Robot. 2015; 31:1260–1280.
Article2. Choi DG, Yi BJ, Kim WK. Design of a spring backbone micro endoscope. Rep U S. 2007; 1815–1821.3. Goldman RE, Bajo A, Simaan N. Compliant motion control for multisegment continuum robots with actuation force sensing. IEEE Trans Robot. 2014; 30:890–902.
Article4. Yoon HS, Cha HJ, Chung J, Yi BJ, Compact design. Compact design of a dual masterslave system for maxillary sinus surgery. Rep U S. 2013; 5027–5032.
Article5. Burgner J, Rucker DC, Gilbert HB, Swaney PJ, Russell PT, Weaver KD, Webster RJ III. A telerobotic system for transnasalsurgery. IEEE ASME Trans Mechatron. 2014; 19:996–1006.6. Hong J, Matsumoto N, Ouchida R, Komune S, Hashizume M. 3-D real-time navigation system for ear-nose-throat surgery. IEEJ Trans Sens Micromachine. 2008; 128:383–388.
Article7. Yoon HS, Oh SM, Chung JH, Lee SH, Tae K, Yi BJ. Navigation through sinus area using endoscope robot system and 3D image. Proc. of Asian Conf. on Computer Aided Surgery. 2011.8. Lee S, Yoon HS, Park J, Chung YS, Hong J, Yi BJ. A surgical navigation and endoscope holder integrated system for sinus surgery. Proc. of Asian Conf. on Computer Aided Surgery. 2015.9. Lang J. Clinical anatomy of the nose, nasal cavity and paranasal sinuses. New York: Thieme;1989. p. 62–72.10. Schriever VA, Hummel T, Lundström JN, Freiherr J. Size of nostril opening as a measure of intranasal volume. Physiol Behav. 2013; 110-111:3–5.
Article11. Moon IH, Park HM, Park JY. Anatomical measurements of the nose and paranasal sinuses using nasal endoscope. Korean J Otolaryngol-Head Neck Surg. 1997; 40:98–102.12. Yoon HS, Oh SM, Chung JH, Lee SH, Tae K, Koh KC, Yi BJ. Active bending endoscope robot system for navigation through sinus area. Rep U S. 2011; 2:967–972.
Article13. Yoon HS, Jeong JH, Chung YS, Hong B, Yi J. A navigation software for sinus surgery. Proc. of Asian Conf. on Computer Aided Surgery. 2013.14. Arun KS, Huang TS, Blostein SD. Least-squares fitting of two 3-d point sets. IEEE Trans Pattern Anal Mach Intell. 1989; 9:698–700.15. Yoon HS, Yi BJ, Yi J. Registration between robot and image coordinate using least square fitting. Proc. Int. Conf. Ubiquitous Robots and Ambient Intelligence. 2009. p. 785–787.
- Full Text Links
-
- Actions
-
Cited
- CITED
-
- Close
- Share
-
- Similar articles
-
- 3 Cases of Computer Aided Endoscopic Sinus Surgery
- Fabricating a Ceramic-Pressed-to-Metal Restoration with Computer-Aided Design, Computer-Aided Manufacturing and Selective Laser Sintering: A Case Report
- Recent advances in dental implants
- Availability of Computer Aided Endoscopic Sinus Surgery
- Review of Computer-Aided Surgery
