Review on Fabrication and Manipulation of Scaffold and Ciliary Microrobots
- Affiliations
-
- 1Department of Robotics Engineering, Daegu Gyeongbuk Institute of Science and Technology (DGIST), 711-873, Daegu, South Korea. mems@dgist.ac.kr
- 2DGIST-ETH Microrobot Research Center, DGIST, 711-873, Daegu, South Korea.
- KMID: 2361198
- DOI: http://doi.org/10.7599/hmr.2016.36.4.235
Abstract
- Various microrobots are being studied for potential biomedical applications including targeted cell transportation, precise drug delivery, opening blocked blood vessels, micro-surgery, sensing, and scaffolding. Precise magnetic field control system is a coil system for wireless control of those microrobots for personalized and minimally invasive treatments. The microrobots for possible biomedical applications are fabricated by micro-electro-mechanical systems (MEMS) and nano-electro-mechanical systems (NEMS) technologies. In this review, fabrication technologies for scaffold and ciliary microrobots will be introduced and their control methods will be discussed. Various materials are being used for the fabrication of the microrobot such as SU-8, IP-Dip, IP-L, silicon, etc. The scaffold and ciliary microrobots are fabricated by SU-8, IP-Dip, and IP-L because these materials showed the maximum performance for three-dimensional (3D) microrobots using a 3D laser lithography system. All or part of the structures are coated with nickel and titanium layers after fabrication of the structures for magnetic control and biocompatibility, respectively, of the microrobots.
Keyword
MeSH Terms
Figure
-
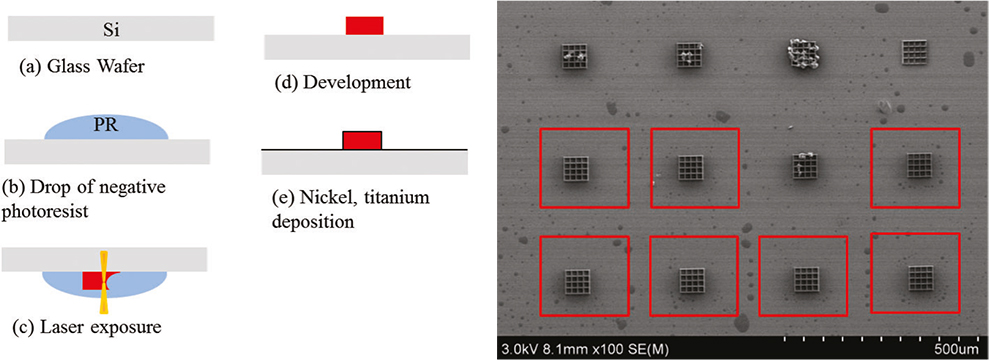
Fig. 1 Fabrication process for 3D porous microrobot using a 3D laser lithography system. (a) Cleaning glass wafer using IPA, (b) Drop-cast of 50~100 ul negative photoresist, (c) laser writing, (d) development, (e) nickel and titanium deposition by a sputter, and (f) fabricated structures for parameter test.
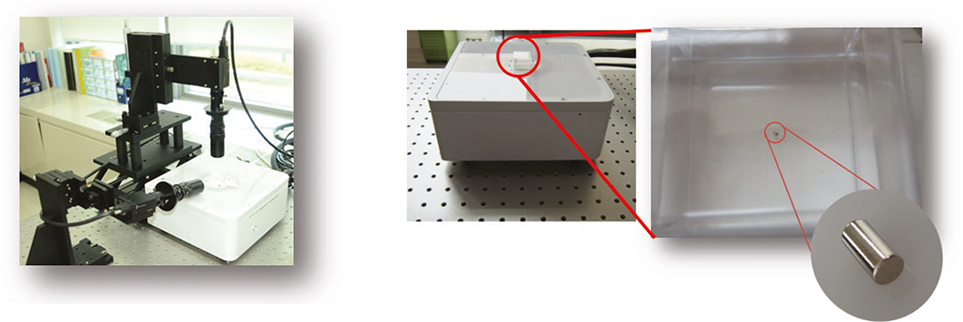
Fig. 2 Magnetic field control system. (a) Overview of the system and (b) a closed view for a container with fluid to immerse a small magnet for control test.
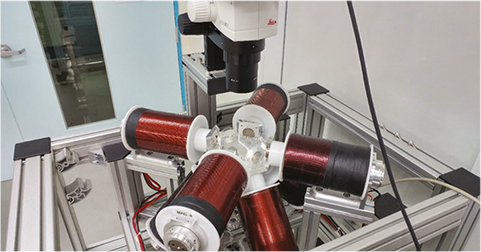
Fig. 3 Magnetic field control system
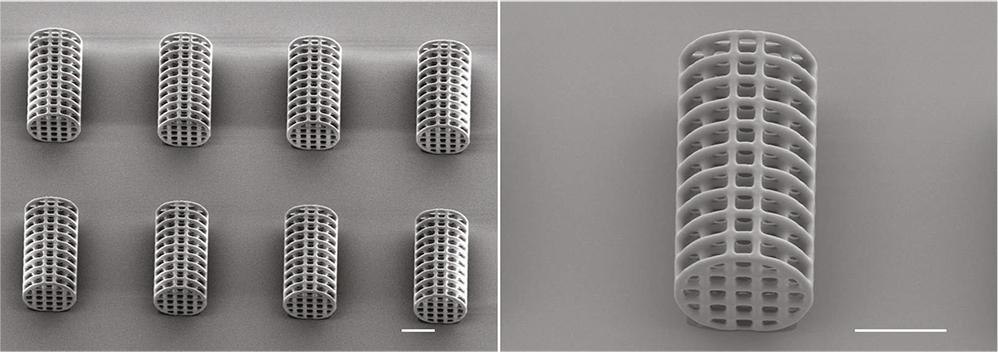
Fig. 4 Fabricated scaffold type microrobots by the 3D laser-lithography system. (Scale bar is 50 µm)
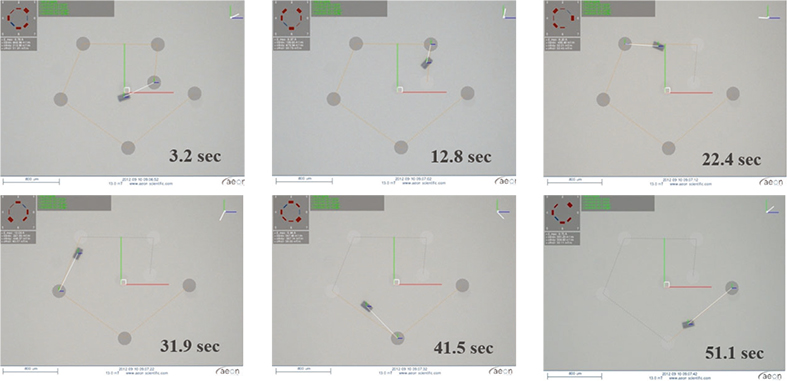
Fig. 5 Autonomous targeted control of a microrobot by 13 mT constant magnetic field.
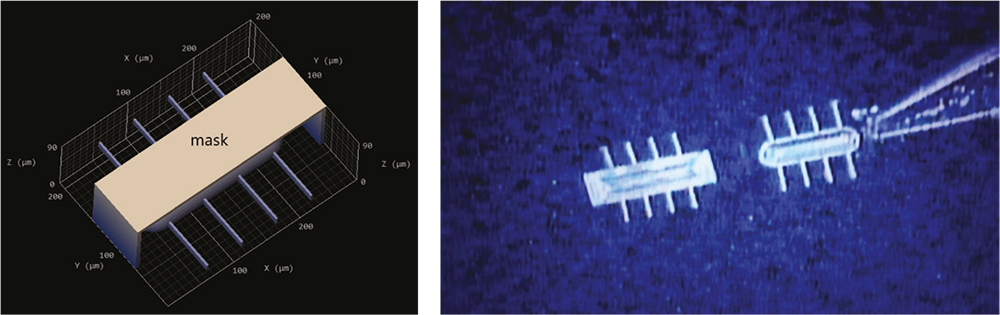
Fig. 6 Ciliary microrobot. (a) Design of the ciliary microrobot with a mask and (b) optical image of the fabricated ciliary microrobots with (left) and without (right) the mask.
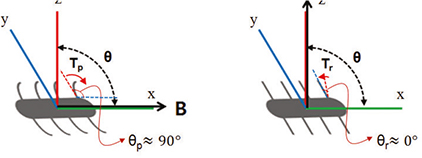
Fig. 7 Driving mechanism of the ciliary microrobot by stroke (a) and recovery (b) motions.
Cited by 1 articles
-
Review of Computer-Aided Surgery
Byung-Ju Yi
Hanyang Med Rev. 2016;36(4):203-204. doi: 10.7599/hmr.2016.36.4.203.
Reference
-
1. Grady MS, Howard MA, 3rd , Molloy JA, Ritter RC, Quate EG, Gillies GT. Nonlinear magnetic stereotaxis: three-dimensional, in vivo remote magnetic manipulation of a small object in canine brain. Med Phys. 1990; 17:405–415.
Article2. Kim S, Qiu F, Kim SH, Ghanbari A, Moon CI, Zhang L, et al. Fabrication and Characterization of Magnetic Microrobots for Three-Dimensional Cell Culture and Targeted Transportation. Adv Mater. 2013; 25:5863–5868.
Article3. Nelson BJ, Kaliakatsos IK, Abbott JJ. Microrobots for minimally invasive medicine. Annu Rev Biomed Eng. 2010; 12:55–85.
Article4. Peyer KE, Zhang L, Nelson BJ. Bio-inspired magnetic swimming microrobots for biomedical applications. Nanoscale. 2013; 5:1259–1272.
Article5. Bailly Y, Amirat Y, Fried G. Modeling and Control of a Continuum Style Microrobot for Endovascular Surgery. IEEE Trans Robot. 2011; 27:1024–1030.
Article6. Mhanna R, Qiu F, Zhang L, Ding Y, Sugihara K, Zenobi-Wong M, et al. Artificial bacterial flagella for remote-controlled targeted single-cell drug delivery. Small. 2014; 10:1953–1957.
Article7. Pawashe C, Floyd S, Sitti M. Modeling and Experimental Characterization of an Untethered Magnetic Micro-Robot. Int J Rob Res. 2009; 28:1077–1094.
Article8. Kim S, Lee S, Lee J, Nelson BJ, Zhang L, Choi H. Fabrication and Manipulation of Ciliary Microrobots with Non-reciprocal Magnetic Actuation. Sci Rep. 2016; 6.
Article9. Tottori S, Zhang L, Qiu F, Krawczyk KK, Franco-Obregon A, Nelson BJ. Magnetic helical micromachines: fabrication, controlled swimming, and cargo transport. Adv Mater. 2012; 24:811–816.
Article10. Temel FZ, Yesilyurt S. Confined swimming of bio-inspired microrobots in rectangular channels. Bioinspir Biomim. 2015; 10:016015.
Article11. Qiu FM, Fujita S, Mhanna R, Zhang L, Simona BR, Nelson BJ. Magnetic Helical Microswimmers Functionalized with Lipoplexes for Targeted Gene Delivery. Adv Funct Mater. 2015; 25:1666–1671.
Article12. Anscombe N. Direct laser writing. Nat Photonics. 2010; 4:22–23.
Article13. Xiong W, Zhou YS, He XN, Gao Y, Mahjouri-Samani M, Jiang L, et al. Simultaneous additive and subtractive three-dimensional nanofabrication using integrated two-photon polymerization and multiphoton ablation. Light Sci Appl. 2012; 1.
Article14. Buckmann T, Stenger N, Kadic M, Kaschke J, Frolich A, Kennerknecht T, et al. Tailored 3D Mechanical Metamaterials Made by Dip-in Direct-Laser-Writing Optical Lithography. Adv Mater. 2012; 24:2710–2714.
Article15. Vollmers K, Frutiger DR, Kratochvil BE, Nelson BJ. Wireless resonant magnetic microactuator for untethered mobile microrobots. Appl Phys Lett. 2008; 92(14):
Article16. Zhang L, Abbott JJ, Dong LX, Kratochvil BE, Bell D, Nelson BJ. Artificial bacterial flagella: Fabrication and magnetic control. Appl Phys Lett. 2009; 94(6):
Article17. Khamesee MB, Kato N, Nomura Y, Nakamura T. Design and control of a microrobotic system using magnetic levitation. IEEE ASME Trans Mechatron. 2002; 7:1–14.
Article18. Yesin KB, Vollmers K, Nelson BJ. Modeling and control of untethered biomicrorobots in a fluidic environment using electromagnetic fields. Int J Robot Res. 2006; 25:527–536.
Article19. Thiel M, Fischer J, von Freymann G, Wegener M. Direct laser writing of three-dimensional submicron structures using a continuous-wave laser at 532 nm. Appl Phys Lett. 2010; 97(22):
Article20. Klein F, Richter B, Striebel T, Franz CM, von Freymann G, Wegener M, et al. Two-Component Polymer Scaffolds for Controlled Three-Dimensional Cell Culture. Adv Mater. 2011; 23:1341–1345.
Article21. Renner M, von Freymann G. Spatial correlations and optical properties in three-dimensional deterministic aperiodic structures. Sci Rep. 2015; 5.
Article22. Available from: http://www.nanoscribe.de/en/products/ip-photoresists.23. Ghanbari A, Chang PH, Nelson BJ, Choi H. Magnetic actuation of a cylindrical microrobot using time-delay-estimation closed-loop control: modeling and experiments. Smart Mater Struct. 2014; 23(3):
Article24. Ghanbari A, Chang PH, Choi H, Nelson BJ. Time delay estimation for control of microrobots under uncertainties. In : 2013 IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM); 2012; Wollongong, Australia.25. Xu TT, Yu JF, Yan XH, Choi H, Zhang L. Magnetic Actuation Based Motion Control for Microrobots: An Overview. Micromachines (Basel). 2015; 6:1346–1364.
Article26. Kummer MP, Abbott JJ, Kratochvil BE, Borer R, Sengul A, Nelson BJ. OctoMag: An Electromagnetic System for 5-DOF Wireless Micromanipulation. IEEE Trans Robot. 2010; 26:1006–1017.
Article27. Bergeles C, Kratochvil BE, Nelson BJ. Visually Servoing Magnetic Intraocular Microdevices. IEEE Trans Robot. 2012; 28:798–809.
Article28. Tsang VL, Bhatia SN. Three-dimensional tissue fabrication. Adv Drug Deliv Rev. 2004; 56:1635–1647.
Article29. Subia B, Kundu J, Kundu SC. Biomaterial scaffold fabrication techniques for potential tissue engineering applications. In : Eberli D, editor. Tissue Engineering. 2010. p. 141–157.30. Kapyla E, Aydogan DB, Virjula S, Vanhatupa S, Miettinen S, Hyttinen J, et al. Direct laser writing and geometrical analysis of scaffolds with designed pore architecture for three-dimensional cell culturing. J Micromech Microeng. 2012; 22(11):31. Klein F, Striebel T, Fischer J, Jiang ZX, Franz CM, von Freymann G, et al. Elastic Fully Three-dimensional Microstructure Scaffolds for Cell Force Measurements. Adv Mater. 2010; 22(8):868–871.
Article32. Purcell EM. Life at Low Reynolds-Number. Am J Phys. 1977; 45:3–11.33. Abbott JJ, Peyer KE, Lagomarsino MC, Zhang L, Dong LX, Kaliakatsos IK, et al. How Should Microrobots Swim? Int J Robot Res. 2009; 28:1434–1447.
Article34. Qiu FM, Zhang L, Peyer KE, Casarosa M, Franco-Obregon A, Choi H, et al. Noncytotoxic artificial bacterial flagella fabricated from biocompatible ORMOCOMP and iron coating. J Mater Chem B Mater Biol Med. 2014; 2:357–362.
Article35. Zhang L, Abbott JJ, Dong LX, Peyer KE, Kratochvil BE, Zhang HX, et al. Characterizing the Swimming Properties of Artificial Bacterial Flagella. Nano Lett. 2009; 9:3663–3667.
Article36. Gao W, Peng XM, Pei A, Kane CR, Tam R, Hennessy C, et al. Bioinspired Helical Microswimmers Based on Vascular Plants. Nano Lett. 2014; 14:305–310.
Article37. Peyer KE, Tottori S, Qiu F, Zhang L, Nelson BJ. Magnetic helical micromachines. Chemistry. 2013; 19:28–38.
Article38. Dreyfus R, Baudry J, Roper ML, Fermigier M, Stone HA, Bibette J. Microscopic artificial swimmers. Nature. 2005; 437:862–865.
Article39. Gao W, Sattayasamitsathit S, Manesh KM, Weihs D, Wang J. Magnetically powered flexible metal nanowire motors. J Am Chem Soc. 2010; 132:14403–14405.
Article40. Khalil IS, Dijkslag HC, Abelmann L, Misra S. MagnetoSperm: A microrobot that navigates using weak magnetic fields. Appl Phys Lett. 2014; 104(22):223701.
Article41. Jang B, Gutman E, Stucki N, Seitz BF, Wendel-Garcia PD, Newton T, et al. Undulatory Locomotion of Magnetic Multilink Nanoswimmers. Nano Lett. 2015; 15:4829–4833.
Article42. Hill DB, Swaminathan V, Estes A, Cribb J, O'Brien ET, Davis CW, et al. Force generation and dynamics of individual cilia under external loading. Biophys J. 2010; 98:57–66.
Article43. Klein F, Striebel T, Fischer J, Jiang Z, Franz CM, von Freymann G, et al. Elastic fully three-dimensional microstructure scaffolds for cell force measurements. Adv Mater. 2010; 22:868–871.
Article
- Full Text Links
-
- Actions
-
Cited
- CITED
-
- Close
- Share
-
- Similar articles
-
- Mechanically Reinforced Extracellular Matrix Scaffold for Application of Cartilage Tissue Engineering
- A Case of Posterior Ciliary Artary Occlusion
- Scaffold Engineering with Flavone-Modified Biomimetic Architecture for Vascular Tissue Engineering Applications
- Usefulness of Multiphase Scaffolds for Improving Tendon to Bone Healing for Rotator Cuff Tears in Shoulder
- Cervical Myelopathy after Neck Manipulation
