Review of New Master/Slave Catheter Driving Vascular Intervention Robot System: Intervention Radiologist's Perspective
- Affiliations
-
- 1Department of Radiology, Research Institute of Radiological Science, Yonsei University, College of Medicine, South Korea. jywon@yuhs.ac
- 2Department of Electronic, Electrical, Control and Instrumentation Engineering, Hanyang University, South Korea.
- KMID: 2361196
- DOI: http://doi.org/10.7599/hmr.2016.36.4.225
Abstract
- The interventional procedure is a percutaneous treatment modality using various devices such as a guide-wire and a catheter under a minimal incision. It is usually done under a fluoroscopy (X-ray radiography) guidance, therefore the operator would be exposed to X-ray irradiation. Recently, a new procedure using a master-slave robotic system is proposed for the intervention procedure, especially in the era of vascular disease. Many state of art intervention robots are under development and this approach can drastically reduce radiation exposure by replacing human effort by a robotic system for high radiation exposure procedures. However, robotic intervention is still more expensive and needs more efficient end effector and easier human interface for a safer and faster procedure. This article provides a comprehensive summary of vascular intervention and necessity of the vascular intervention robot system.
Keyword
Figure
-

Fig. 1 Picture of intervention procedure: It is usually performed under the fluoroscopy (X-ray radiography) after a full surgical drape of the patient and operator.
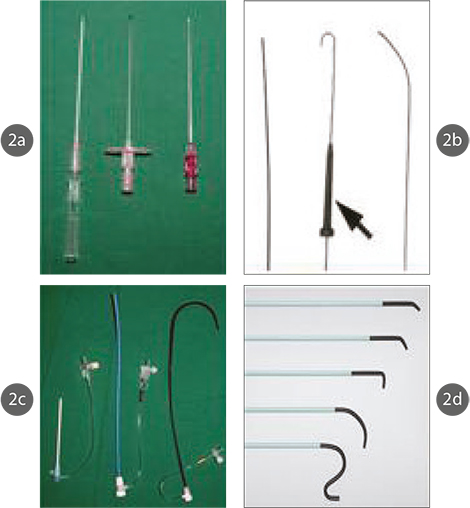
Fig. 2 Intervention Devices; (a)Puncture needle, (b)guide wire, (c) introducer sheath, (d)catheter

Fig. 3 Basic vascular intervention procedure. (a) Vascular puncture: The needle is used to puncture a femoral artery that is palpable typically in the groin under an ultrasound-guidance or palpation examination. (b) Insertion of the guide wire: The guide wire is inserted through the puncture needle. (c)Insertion of the introducer catheter: The introducer catheter is inserted along the guide wire. (d)Insertion of the catheter: The catheter is inserted along a guide wire through the inside of the introducer catheter.

Fig. 4 Radiation protection equipment. Clothing at about 10 Kg, lead glasses, and thyroid protectors.
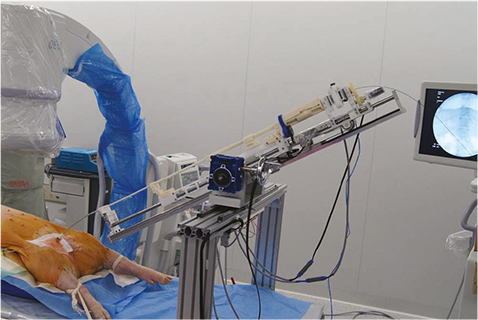
Fig. 5 Our vascular intervention robot system under development. Animal experiment.
Cited by 1 articles
-
Review of Computer-Aided Surgery
Byung-Ju Yi
Hanyang Med Rev. 2016;36(4):203-204. doi: 10.7599/hmr.2016.36.4.203.
Reference
-
1. Li S, Shen J, Yan Y, Chen D. [Overview of the vascular interventional surgery robot]. Zhongguo Yi Liao Qi Xie Za Zhi. 2013; 37:119–122.2. Ganji Y, Janabi-Sharifi F, Cheema AN. Robot-assisted catheter manipulation for intracardiac navigation. Int J Comput Assist Radiol Surg. 2009; 4:307–315.
Article3. Meng C, Zhang J, Liu D, Liu B, Zhou F. A remote-controlled vascular interventional robot: system structure and image guidance. Int J Med Robot. 2013; 9:230–239.
Article4. Saliba W, Cummings JE, Oh S, Zhang Y, Mazgalev TN, Schweikert RA, et al. Novel robotic catheter remote control system: feasibility and safety of transseptal puncture and endocardial catheter navigation. J Cardiovasc Electrophysiol. 2006; 17:1102–1105.
Article5. Mohapatra A, Greenberg RK, Mastracci TM, Eagleton MJ, Thornsberry B. Radiation exposure to operating room personnel and patients during endovascular procedures. J Vasc Surg. 2013; 58:702–709.
Article6. Katzen BT. Robotic catheterization: the importance of evaluation by interventional radiologists. J Vasc Interv Radiol. 2014; 25:1848–1849.
Article7. Srimathveeravalli G, Kesavadas T, Li X. Design and fabrication of a robotic mechanism for remote steering and positioning of interventional devices. Int J Med Robot. 2010; 6:160–170.
Article8. Thakur Y, Bax JS, Holdsworth DW, Drangova M. Design and performance evaluation of a remote catheter navigation system. IEEE Trans Biomed Eng. 2009; 56:1901–1908.
Article9. Wang T, Zhang D, Da L. Remote-controlled vascular interventional surgery robot. Int J Med Robot. 2010; 6:194–201.
Article10. Antoniou GA, Riga CV, Mayer EK, Cheshire NJ, Bicknell CD. Clinical applications of robotic technology in vascular and endovascular surgery. J Vasc Surg. 2011; 53:493–499.
Article11. Rolls AE, Riga CV, Bicknell CD, Regan L, Cheshire NJ, Hamady MS. Robot-assisted uterine artery embolization: a first-in-woman safety evaluation of the Magellan System. J Vasc Interv Radiol. 2014; 25:1841–1848.
Article12. Riga CV, Bicknell CD, Rolls A, Cheshire NJ, Hamady MS. Robot-assisted fenestrated endovascular aneurysm repair (FEVAR) using the Magellan system. J Vasc Interv Radiol. 2013; 24:191–196.
Article13. Thaveau F, Nicolini P, Lucereau B, Georg Y, Lejay A, Chakfe N. Associated Da Vinci and magellan robotic systems for successful treatment of nutcracker syndrome. J Laparoendosc Adv Surg Tech A. 2015; 25:60–63.
Article
- Full Text Links
-
- Actions
-
Cited
- CITED
-
- Close
- Share
-
- Similar articles
-
- Development of a Robotic Colonoscopic Manipulation System, Using Haptic Feedback Algorithm
- Four-Week, Home-Based, Robot Cognitive Intervention for Patients with Mild Cognitive Impairment: a Pilot Randomized Controlled Trial
- Effects of a Cognitive Intervention Using Robot PIO on Cognitive and Emotional Function in Dementia Patients
- A Case of Sheathless Transradial Coronary Intervention for Complex Coronary Lesions with a Standard Guiding Catheter
- A Review of Robot-Assisted Gait Training in Stroke Patients
