Feasibility of Obtaining Quantitative 3-Dimensional Information Using Conventional Endoscope: A Pilot Study
- Affiliations
-
- 1Division of Gastroenterology and Hepatology, Department of Internal Medicine, Korea University College of Medicine, Seoul, Korea. drchunhj@chol.com
- 2Department of Electrical Engineering, Korea University College of Engineering, Seoul, Korea.
Abstract
- BACKGROUND/AIMS
Three-dimensional (3D) imaging is gaining popularity and has been partly adopted in laparoscopic surgery or robotic surgery but has not been applied to gastrointestinal endoscopy. As a first step, we conducted an experiment to evaluate whether images obtained by conventional gastrointestinal endoscopy could be used to acquire quantitative 3D information.
METHODS
Two endoscopes (GIF-H260) were used in a Borrmann type I tumor model made of clay. The endoscopes were calibrated by correcting the barrel distortion and perspective distortion. Obtained images were converted to gray-level image, and the characteristics of the images were obtained by edge detection. Finally, data on 3D parameters were measured by using epipolar geometry, two view geometry, and pinhole camera model.
RESULTS
The focal length (f) of endoscope at 30 mm was 258.49 pixels. Two endoscopes were fixed at predetermined distance, 12 mm (d12). After matching and calculating disparity (v2-v1), which was 106 pixels, the calculated length between the camera and object (L) was 29.26 mm. The height of the object projected onto the image (h) was then applied to the pinhole camera model, and the result of H (height and width) was 38.21 mm and 41.72 mm, respectively. Measurements were conducted from 2 different locations. The measurement errors ranged from 2.98% to 7.00% with the current Borrmann type I tumor model.
CONCLUSIONS
It was feasible to obtain parameters necessary for 3D analysis and to apply the data to epipolar geometry with conventional gastrointestinal endoscope to calculate the size of an object.
MeSH Terms
Figure
-
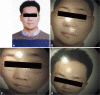
Fig. 1 An example of distorted image by an endoscope. Fish-eye lens utilized in endoscope causes barrel distortion of the original image (A), rendering distorted images (B, C, D).

Fig. 2 Correction of barrel distortion and perspective distortion. To be able to use images obtained by endoscopes for further analysis, the original image should be preprocessed by correcting the barrel distortion and perspective distortion.

Fig. 3 An example of stereo-images. Stereo-image is a pair of images captured by two cameras. Matching is the process of finding the corresponding position of the point on the left image with that of the right image. Disparity is relative position of a point in an image.
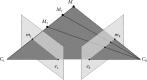
Fig. 4 Epipolar geometry. When the points connecting M, M1, M2, etc. are observed from CL, it is observed as a dot on its image plane as mL, but when these points are observed from CR, it is observed as a line on its image plane as eR-mR.
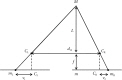
Fig. 5 Two view geometry of cameras. In this model, d12 is the distance between two cameras, f the focal length, L the distance between the cameras and the object, and v1-v2 the disparity.
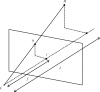
Fig. 6 Pinhole camera model. In this model, f is the focal length, C the camera centre, c the image centre, h the image point of H, and L the distance between the camera center and the object.
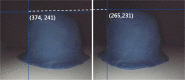
Fig. 7 The stereo-image of Borrmann type I tumor model. The matching point was (left, 374, 241) and (right, 265, 231), and the resulting disparity was 106 pixels.
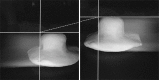
Fig. 8 The stereo-image of preliminary Borrmann type I tumor experimental model. When two endoscopes of the same model and equal illuminating power were used simultaneously to obtain stereo-images, light interference occurred, leaving behind artifacts resembling a comet's tails.
Reference
-
1. Fox WC, Wawrzyniak S, Chandler WF. Intraoperative acquisition of three-dimensional imaging for frameless stereotactic guidance during transsphenoidal pituitary surgery using the Arcadis Orbic System. J Neurosurg. 2008; 108:746–750. PMID: 18377254.
Article2. Tan GY, Goel RK, Kaouk JH, Tewari AK. Technological advances in robotic-assisted laparoscopic surgery. Urol Clin North Am. 2009; 36:237–249. PMID: 19406324.
Article3. Taffinder N, Smith SG, Huber J, Russell RC, Darzi A. The effect of a second-generation 3D endoscope on the laparoscopic precision of novices and experienced surgeons. Surg Endosc. 1999; 13:1087–1092. PMID: 10556444.
Article4. Perkins N, Starkes JL, Lee TD, Hutchison C. Learning to use minimal access surgical instruments and 2-dimensional remote visual feedback: how difficult is the task for novices? Adv Health Sci Educ Theory Pract. 2002; 7:117–131. PMID: 12075144.5. Hofmeister J, Frank TG, Cuschieri A, Wade NJ. Perceptual aspects of two-dimensional and stereoscopic display techniques in endoscopic surgery: review and current problems. Semin Laparosc Surg. 2001; 8:12–24. PMID: 11337734.
Article6. Pietrabissa A, Scarcello E, Carobbi A, Mosca F. Three-dimensional versus two-dimensional video system for the trained endoscopic surgeon and the beginner. Endosc Surg Allied Technol. 1994; 2:315–317. PMID: 7704553.7. Wood BJ, Razavi P. Virtual endoscopy: a promising new technology. Am Fam Physician. 2002; 66:107–112. PMID: 12126025.8. Swaminathan R, Nayar SK. Nonmetric calibration of wide-angle lenses and polycameras. IEEE Trans Pattern Anal Mach Intell. 2000; 22:1172–1178.
Article9. Heikkila J. Geometric camera calibration using circular control points. IEEE Trans Pattern Anal Mach Intell. 2000; 22:1066–1077.
Article10. Miyamoto K. Fish eye lens. J Opt Soc Am. 1964; 54:1060–1061.
Article11. Kannala J, Brandt SS. A generic camera model and calibration method for conventional, wide-angle, and fish-eye lenses. IEEE Trans Pattern Anal Mach Intell. 2006; 28:1335–1340. PMID: 16886867.
Article12. Stehle T, Truhn D, Aach T, Trautwein C, Tischendorf J. Institute of Electrical and Electronics Engineers. IEEE Engineering in Medicine and Biology Society. IEEE Signal Processing Society. Camera calibration for fish-eye lenses in endoscopy with an application to 3D reconstruction. From Nano to Macro. 2007. In : 4th IEEE International Symposium on Biomedical Imaging; 2007 April 12-15; Arlington, VI, USA. Piscataway: IEEE;p. 1176–1179.13. Kong SH, Oh BM, Yoon H, et al. Comparison of two- and three-dimensional camera systems in laparoscopic performance: a novel 3D system with one camera. Surg Endosc. 2010; 24:1132–1143. PMID: 19911222.
Article14. Nakatani H, Abe K, Miyakawa A, Terakawa S. Three-dimensional measurement endoscope system with virtual rulers. J Biomed Opt. 2007; 12:051803. PMID: 17994881.
Article15. Hasegawa K, Sato Y. Endoscope system for high-speed 3D measurement. Syst Comput Jpn. 2001; 32:30–39.
Article
- Full Text Links
-
- Actions
-
Cited
- CITED
-
- Close
- Share
-
- Similar articles
-
- A Pilot Trial of Ambulatory Monitoring of Gastric Motility Using a Modified Magnetic Capsule Endoscope
- Clinical Comparison of 3D Endoscopic Sinonasal Surgery Between ‘Insect Eye’ 3D and ‘Twin Lens’ 3D Endoscopes
- 3D Printer Application for Endoscope-Assisted Spine Surgery Instrument Development: From Prototype Instruments to Patient-Specific 3D Models
- Introduction of a pilot study
- Endoscope-Assisted Hairline Approach for Head and Neck Masses: A Review
