Yonsei Med J.
2017 Sep;58(5):1075-1077. 10.3349/ymj.2017.58.5.1075.
Robotic Cholecystectomy Using the Newly Developed Korean Robotic Surgical System, Revo-i: A Preclinical Experiment in a Porcine Model
- Affiliations
-
- 1Department of Hepatobiliary and Pancreatic Surgery, Yonsei University College of Medicine, Seoul, Korea. wjlee@yuhs.ac
- 2Department of Surgery, Yongin Severance Hospital, Yonsei University College of Medicine, Yongin, Korea.
- 3meerecompany Inc., Hwasung, Korea.
- 4Robot and MIS Center, Severance Hospital, Seoul, Korea.
- 5Department of Laboratory Animal Resources, Yonsei University College of Medicine, Seoul, Korea.
- KMID: 2418950
- DOI: http://doi.org/10.3349/ymj.2017.58.5.1075
Abstract
- One Korean company recently successfully produced a robotic surgical system prototype called Revo-i (MSR-5000). We, therefore, conducted a preclinical study for robotic cholecystectomy using Revo-i, and this is a report of the first case of robotic cholecystectomy performed using the Revo-i system in a preclinical porcine model. Revo-i consists of a surgeon console (MSRC-5000), operation cart (MSRO-5000) and vision cart (MSRV-5000), and a 40 kg-healthy female porcine was prepared for robotic cholecystectomy with general anesthesia. The primary end point was the safe completion of these procedures using Revo-i: The total operation time was 88 minutes. The dissection time was defined as the time from the initial dissection of the Calot area to the time to complete gallbladder detachment from the liver bed: The dissection time required 14 minutes. The surgical console time was 45 minutes. There was no gallbladder perforation or significant bleeding noted during the procedure. The porcine survived for two weeks postoperatively without any complications. Like the da Vinci surgical system, the Revo-i provides a three-dimensional operative view and allows for angulated instrument motion (forceps, needle-holders, clip-appliers, scissors, bipolar energy, and hook monopolar energy), facilitating an effective laparoscopic procedure. Our experience suggests that robotic cholecystectomy can be safely completed in a porcine model using Revo-i.
MeSH Terms
Figure
-
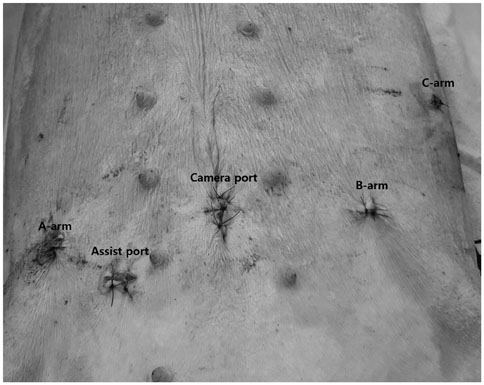
Fig. 1 Ports positioning. 1.5 cm incision was made for camera port around umbilicus. Other robotic ports were positioned approximately 10 cm from each other to reduce fighting between the arms. 8 mm incisions were made on A-arm, B-arm, and C-arm. 1 cm incision was made on assist port.
Cited by 2 articles
-
Revo-i assisted robotic central pancreatectomy
Gayoon Ku, Incheon Kang, Woo Jung Lee, Chang Moo Kang
Ann Hepatobiliary Pancreat Surg. 2020;24(4):547-550. doi: 10.14701/ahbps.2020.24.4.547.First experience of pancreaticoduodenectomy using Revo-i in a patient with insulinoma
Incheon Kang, Ho Kyoung Hwang, Woo Jung Lee, Chang Moo Kang
Ann Hepatobiliary Pancreat Surg. 2020;24(1):104-108. doi: 10.14701/ahbps.2020.24.1.104.
Reference
-
1. Lee WJ, Chan CP, Wang BY. Recent advances in laparoscopic surgery. Asian J Endosc Surg. 2013; 6:1–8.
Article2. National Institutes of Health Consensus Development Conference Statement on Gallstones and Laparoscopic Cholecystectomy. Am J Surg. 1993; 165:390–398.3. Satava RM. Surgical robotics: the early chronicles: a personal historical perspective. Surg Laparosc Endosc Percutan Tech. 2002; 12:6–16.4. Giulianotti PC, Coratti A, Angelini M, Sbrana F, Cecconi S, Balestracci T, et al. Robotics in general surgery: personal experience in a large community hospital. Arch Surg. 2003; 138:777–784.5. Szold A, Bergamaschi R, Broeders I, Dankelman J, Forgione A, Langø T, et al. European Association of Endoscopic Surgeons (EAES) consensus statement on the use of robotics in general surgery. Surg Endosc. 2015; 29:253–288.
Article6. Kang CM, Chi HS, Hyeung WJ, Kim KS, Choi JS, Lee WJ, et al. The first Korean experience of telemanipulative robot-assisted laparoscopic cholecystectomy using the da Vinci system. Yonsei Med J. 2007; 48:540–545.
Article
