J Korean Orthop Assoc.
2013 Dec;48(6):413-418. 10.4055/jkoa.2013.48.6.413.
Computer-Assisted Spine Surgery (CASS)
- Affiliations
-
- 1Department of Orthopaedic Surgery, Spine Center, Seoul National University Bundang Hospital, Seoul National University College of Medicine, Seongnam, Korea. spinedb@gmail.com
- KMID: 2185274
- DOI: http://doi.org/10.4055/jkoa.2013.48.6.413
Abstract
- Computer-assisted spine surgery (CASS) is a new discipline involving application of computer engineering and mechanical engineering to spine surgery. The tools used most commonly include preoperative surgical simulation, intraoperative navigation, and robot-assisted surgery. Surgical simulation has been utilized for both clinical and basic research. Navigation in spine surgery has focused on guidance of screw placement, however, due to limited accuracy and high cost, its use is somewhat sparse. CASS may be combined with minimal invasive spine surgery in the near future. Further validation of clinical accuracy issues and surgical outcomes as well as cost-benefit analysis is required.
Keyword
MeSH Terms
Figure
-
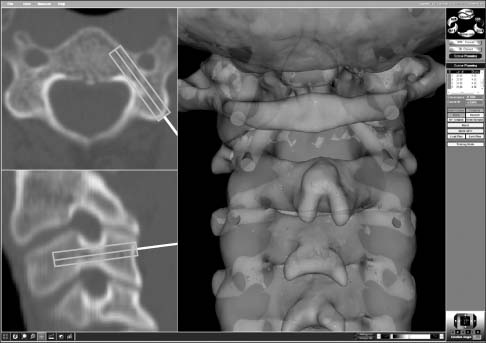
Fig. 1 A screen-shot image of simulation software for pedicle screw insertion is shown.

Fig. 2 An intraoperative photograph of the Renaissance™ robot is shown.
Reference
-
1. DiGioia AM 3rd. What is computer assisted orthopaedic surgery? Clin Orthop Relat Res. 1998; 354:2–4.2. Shin SI, Yeom JS, Kim HJ, Chang BS, Lee CK, Riew KD. The feasibility of laminar screw placement in the subaxial spine: analysis using 215 three-dimensional computed tomography scans and simulation software. Spine J. 2012; 12:577–584.
Article3. Lee JO, Buchowski JM, Lee KM, et al. Optimal trajectory for the occipital condylar screw. Spine (Phila Pa 1976). 2012; 37:385–392.
Article4. Lee KM, Yeom JS, Lee JO, et al. Optimal trajectory for the atlantooccipital transarticular screw. Spine (Phila Pa 1976). 2010; 35:1562–1570.
Article5. Nagamoto Y, Ishii T, Iwasaki M, et al. Three-dimensional motion of the uncovertebral joint during head rotation. J Neurosurg Spine. 2012; 17:327–333.
Article6. Kawaguchi Y, Nakano M, Yasuda T, Seki S, Hori T, Kimura T. Development of a new technique for pedicle screw and Magerl screw insertion using a 3-dimensional image guide. Spine (Phila Pa 1976). 2012; 37:1983–1988.
Article7. Hayashi K, Upasani VV, Pawelek JB, et al. Three-dimensional analysis of thoracic apical sagittal alignment in adolescent idiopathic scoliosis. Spine (Phila Pa 1976). 2009; 34:792–797.
Article8. Hodges SD, Eck JC, Newton D. Analysis of CT-based navigation system for pedicle screw placement. Orthopedics. 2012; 35:e1221–e1224.
Article9. Miyamoto H, Uno K. Cervical pedicle screw insertion using a computed tomography cutout technique. J Neurosurg Spine. 2009; 11:681–687.
Article10. Papadopoulos EC, Girardi FP, Sama A, Sandhu HS, Cammisa FP Jr. Accuracy of single-time, multilevel registration in image-guided spinal surgery. Spine J. 2005; 5:263–267.
Article11. Yang YL, Fu BS, Li RW, et al. Anterior single screw fixation of odontoid fracture with intraoperative Iso-C 3-dimensional imaging. Eur Spine J. 2011; 20:1899–1907.
Article12. Patil S, Lindley EM, Burger EL, Yoshihara H, Patel VV. Pedicle screw placement with O-arm and stealth navigation. Orthopedics. 2012; 35:e61–e65.
Article13. Hananouchi T, Nakamura N, Kakimoto A, Yohsikawa H, Sugano N. CT-based planning of a single-radius femoral component in total knee arthroplasty using the ROBODOC system. Comput Aided Surg. 2008; 13:23–29.
Article14. Mozes A, Chang TC, Arata L, Zhao W. Three-dimensional A-mode ultrasound calibration and registration for robotic orthopaedic knee surgery. Int J Med Robot. 2010; 6:91–101.
Article15. Pechlivanis I, Kiriyanthan G, Engelhardt M, et al. Percutaneous placement of pedicle screws in the lumbar spine using a bone mounted miniature robotic system: first experiences and accuracy of screw placement. Spine (Phila Pa 1976). 2009; 34:392–398.16. Cho JY, Chan CK, Lee SH, Lee HY. The accuracy of 3D image navigation with a cutaneously fixed dynamic reference frame in minimally invasive transforaminal lumbar interbody fusion. Comput Aided Surg. 2012; 17:300–309.
Article17. Fraser J, Gebhard H, Irie D, Parikh K, Härtl R. Iso-C/3-dimensional neuronavigation versus conventional fluoroscopy for minimally invasive pedicle screw placement in lumbar fusion. Minim Invasive Neurosurg. 2010; 53:184–190.
Article18. Tian NF, Huang QS, Zhou P, et al. Pedicle screw insertion accuracy with different assisted methods: a systematic review and meta-analysis of comparative studies. Eur Spine J. 2011; 20:846–859.
Article19. Verma R, Krishan S, Haendlmayer K, Mohsen A. Functional outcome of computer-assisted spinal pedicle screw placement: a systematic review and meta-analysis of 23 studies including 5,992 pedicle screws. Eur Spine J. 2010; 19:370–375.
Article20. Härtl R, Lam KS, Wang J, Korge A, Kandziora F, Audigé L. Worldwide Survey on the Use of Navigation in Spine Surgery. World Neurosurg. 2013; 79:162–172.
Article
- Full Text Links
-
- Actions
-
Cited
- CITED
-
- Close
- Share
-
- Similar articles
-
- Trends in the Charges and Utilization of Computer-Assisted Navigation in Cervical and Thoracolumbar Spinal Surgery
- Computer Assisted Navigation in Knee Arthroplasty
- Computer-Assisted Navigation in High Tibial Osteotomy
- A novel method for the management of proximal segment using computer assisted simulation surgery: correct condyle head positioning and better proximal segment placement
- Computer-Assisted Total Hip Arthroplasty
