Intervention Planning Using a Laser Navigation System for CT-Guided Interventions: A Phantom and Patient Study
- Affiliations
-
- 1Institute for Diagnostic and Interventional Radiology, J. W. Goethe University of Frankfurt, Frankfurt 60590, Germany. tgruberrouh@googlemail.com
- 2Department of Radiology, Faculty of Medicine, Alexandria University, Alexandria 21514, Egypt.
- 3Department of Radiology, HELIOS Klinikum Erfurt, Erfurt 99089, Germany.
- KMID: 2155545
- DOI: http://doi.org/10.3348/kjr.2015.16.4.729
Abstract
OBJECTIVE
To investigate the accuracy, efficiency and radiation dose of a novel laser navigation system (LNS) compared to those of free-handed punctures on computed tomography (CT).
MATERIALS AND METHODS
Sixty punctures were performed using a phantom body to compare accuracy, timely effort, and radiation dose of the conventional free-handed procedure to those of the LNS-guided method. An additional 20 LNS-guided interventions were performed on another phantom to confirm accuracy. Ten patients subsequently underwent LNS-guided punctures.
RESULTS
The phantom 1-LNS group showed a target point accuracy of 4.0 +/- 2.7 mm (freehand, 6.3 +/- 3.6 mm; p = 0.008), entrance point accuracy of 0.8 +/- 0.6 mm (freehand, 6.1 +/- 4.7 mm), needle angulation accuracy of 1.3 +/- 0.9degrees (freehand, 3.4 +/- 3.1degrees; p < 0.001), intervention time of 7.03 +/- 5.18 minutes (freehand, 8.38 +/- 4.09 minutes; p = 0.006), and 4.2 +/- 3.6 CT images (freehand, 7.9 +/- 5.1; p < 0.001). These results show significant improvement in 60 punctures compared to freehand. The phantom 2-LNS group showed a target point accuracy of 3.6 +/- 2.5 mm, entrance point accuracy of 1.4 +/- 2.0 mm, needle angulation accuracy of 1.0 +/- 1.2degrees, intervention time of 1.44 +/- 0.22 minutes, and 3.4 +/- 1.7 CT images. The LNS group achieved target point accuracy of 5.0 +/- 1.2 mm, entrance point accuracy of 2.0 +/- 1.5 mm, needle angulation accuracy of 1.5 +/- 0.3degrees, intervention time of 12.08 +/- 3.07 minutes, and used 5.7 +/- 1.6 CT-images for the first experience with patients.
CONCLUSION
Laser navigation system improved accuracy, duration of intervention, and radiation dose of CT-guided interventions.
Keyword
MeSH Terms
Figure
-

Fig. 1 Laser navigation system (LNS) is fixed to carrying arm attached to computed tomography (CT) room ceiling. C-arm of LNS is positioned in front of gantry (arrow). System does not impair regular use of CT room.
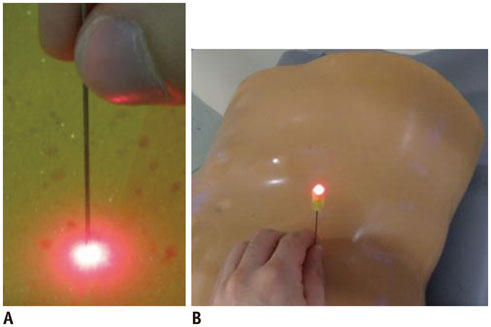
Fig. 2 Marking needle entry point with laser navigation system (LNS). A. Image illustrates placing needle tip on surface of Phantom 2 with laser spot marked by LNS during intervention. B. Needle is adjusted in direction of laser beam denoted by projecting laser beam as point on centre of upper end of puncture needle during lesion targeting in Phantom 1.
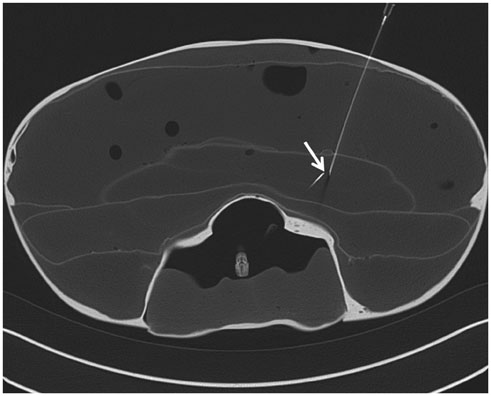
Fig. 3 Phantom 1 computed tomography (CT) image. Axial CT image of Phantom 1 using laser navigation system showing needle reaching its target position (arrow).
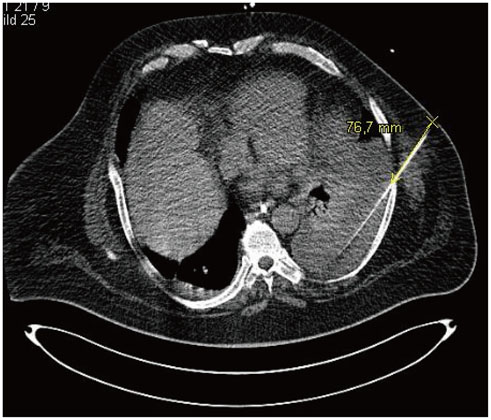
Fig. 4 Computed tomography image of patient with pleural effusion left. Confirmation of needle position in comparison to planned needle path for intervention using laser navigation system in patient with pleural effusion left.
Reference
-
1. Moser C, Becker J, Deli M, Busch M, Boehme M, Groenemeyer DH. A novel Laser Navigation System reduces radiation exposure and improves accuracy and workflow of CT-guided spinal interventions: a prospective, randomized, controlled, clinical trial in comparison to conventional freehand puncture. Eur J Radiol. 2013; 82:627–632.2. Nitta N, Takahashi M, Tanaka T, Takazakura R, Sakashita Y, Furukawa A, et al. Laser-guided computed tomography puncture system: simulation experiments using artificial phantom lesions and preliminary clinical experience. Radiat Med. 2007; 25:187–193.3. Yang CL, Yang BD, Lin ML, Wang YH, Wang JL. A patient-mount navigated intervention system for spinal diseases and its clinical trial on percutaneous pulsed radiofrequency stimulation of dorsal root ganglion. Spine (Phila Pa 1976). 2010; 35:E1126–EE113.4. Krombach GA, Schmitz-Rode T, Wein BB, Meyer J, Wildberger JE, Brabant K, et al. Potential of a new laser target system for percutaneous CT-guided nerve blocks: technical note. Neuroradiology. 2000; 42:838–841.5. Tovar-Arriaga S, Tita R, Pedraza-Ortega JC, Gorrostieta E, Kalender WA. Development of a robotic FD-CT-guided navigation system for needle placement-preliminary accuracy tests. Int J Med Robot. 2011; 7:225–236.6. Kloeppel R, Weisse T, Deckert F, Wilke W, Pecher S. CT-guided intervention using a patient laser marker system. Eur Radiol. 2000; 10:1010–1014.7. Palestrant AM. Comprehensive approach to CT-guided procedures with a hand-held guidance device. Radiology. 1990; 174:270–272.8. Bale R, Widmann G. Navigated CT-guided interventions. Minim Invasive Ther Allied Technol. 2007; 16:196–204.9. Ritter M, Rassweiler MC, Häcker A, Michel MS. Laser-guided percutaneous kidney access with the Uro Dyna-CT: first experience of three-dimensional puncture planning with an ex vivo model. World J Urol. 2013; 31:1147–1151.10. Zangos S, Müller C, Mayer F, Naguib NN, Nour-Eldin NE, Hansmann ML, et al. [Retrospective 5-year analysis of MR-guided biopsies in a low-field MR system]. Rofo. 2009; 181:658–663.11. Schell B, Eichler K, Mack MG, Müller C, Kerl JM, Czerny C, et al. [Robot-assisted biopsies in a high-field MRI system - first clinical results]. Rofo. 2012; 184:42–47.12. Moche M, Zajonz D, Kahn T, Busse H. MRI-guided procedures in various regions of the body using a robotic assistance system in a closed-bore scanner: preliminary clinical experience and limitations. J Magn Reson Imaging. 2010; 31:964–974.13. Zangos S, Melzer A, Eichler K, Sadighi C, Thalhammer A, Bodelle B, et al. MR-compatible assistance system for biopsy in a high-field-strength system: initial results in patients with suspicious prostate lesions. Radiology. 2011; 259:903–910.14. Becker HC, Meissner O, Waggershauser T. [C-arm CT-guided 3D navigation of percutaneous interventions]. Radiologe. 2009; 49:852–855.15. Proschek D, Kafchitsas K, Rauschmann MA, Kurth AA, Vogl TJ, Geiger F. Reduction of radiation dose during facet joint injection using the new image guidance system SabreSource: a prospective study in 60 patients. Eur Spine J. 2009; 18:546–553.16. Jacobi V, Thalhammer A, Kirchner J. Value of a laser guidance system for CT interventions: a phantom study. Eur Radiol. 1999; 9:137–140.17. Penzkofer T, Bruners P, Isfort P, Schoth F, Günther RW, Schmitz-Rode T, et al. Free-hand CT-based electromagnetically guided interventions: accuracy, efficiency and dose usage. Minim Invasive Ther Allied Technol. 2011; 20:226–233.18. Appelbaum L, Sosna J, Nissenbaum Y, Benshtein A, Goldberg SN. Electromagnetic navigation system for CT-guided biopsy of small lesions. AJR Am J Roentgenol. 2011; 196:1194–1200.19. Penzkofer T, Isfort P, Bruners P, Wiemann C, Kyriakou Y, Kalender WA, et al. Robot arm based flat panel CT-guided electromagnetic tracked spine interventions: phantom and animal model experiments. Eur Radiol. 2010; 20:2656–2662.20. Magnusson A, Radecka E, Lönnemark M, Raland H. Computed-tomography-guided punctures using a new guidance device. Acta Radiol. 2005; 46:505–509.
- Full Text Links
-
- Actions
-
Cited
- CITED
-
- Close
- Share
-
- Similar articles
-
- A Study on the Availability of the On-Board Imager (OBI) and Cone-Beam CT (CBCT) in the Verification of Patient Set-up
- Ultrasound-guided genitourinary interventions: principles and techniques
- Accuracy and Safety in Pedicle Screw Placement in the Thoracic and Lumbar Spines : Comparison Study between Conventional C-Arm Fluoroscopy and Navigation Coupled with O-Arm(R) Guided Methods
- Radiological Results and Assessment of Navigation-Guided Total Knee Arthroplasty
- Endoscopic ultrasound-guided vascular interventions: An overview of current and emerging techniques
