Computer-Assisted Orthopaedic Surgery and Robotic Surgery in Total Hip Arthroplasty
- Affiliations
-
- 1Department of Orthopaedic Medical Engineering, Osaka University Graduate School of Medicine, Osaka, Japan. n-sugano@umin.net
- KMID: 1402320
- DOI: http://doi.org/10.4055/cios.2013.5.1.1
Abstract
- Various systems of computer-assisted orthopaedic surgery (CAOS) in total hip arthroplasty (THA) were reviewed. The first clinically applied system was an active robotic system (ROBODOC), which performed femoral implant cavity preparation as programmed preoperatively. Several reports on cementless THA with ROBODOC showed better stem alignment and less variance in limb-length inequality on radiographic evaluation, less incidence of pulmonary embolic events on transesophageal cardioechogram, and less stress shielding on the dual energy X-ray absorptiometry analysis than conventional manual methods. On the other hand, some studies raise issues with active systems, including a steep learning curve, muscle and nerve damage, and technical complications, such as a procedure stop due to a bone motion during cutting, requiring re-registration and registration failure. Semi-active robotic systems, such as Acrobot and Rio, were developed for ease of surgeon acceptance. The drill bit at the tip of the robotic arm is moved by a surgeon's hand, but it does not move outside of a milling path boundary, which is defined according to three-dimensional (3D) image-based preoperative planning. However, there are still few reports on THA with these semi-active systems. Thanks to the advancements in 3D sensor technology, navigation systems were developed. Navigation is a passive system, which does not perform any actions on patients. It only provides information and guidance to the surgeon who still uses conventional tools to perform the surgery. There are three types of navigation: computed tomography (CT)-based navigation, imageless navigation, and fluoro-navigation. CT-based navigation is the most accurate, but the preoperative planning on CT images takes time that increases cost and radiation exposure. Imageless navigation does not use CT images, but its accuracy depends on the technique of landmark pointing, and it does not take into account the individual uniqueness of the anatomy. Fluoroscopic navigation is good for trauma and spine surgeries, but its benefits are limited in the hip and knee reconstruction surgeries. Several studies have shown that the cup alignment with navigation is more precise than that of the conventional mechanical instruments, and that it is useful for optimizing limb length, range of motion, and stability. Recently, patient specific templates, based on CT images, have attracted attention and some early reports on cup placement, and resurfacing showed improved accuracy of the procedures. These various CAOS systems have pros and cons. Nonetheless, CAOS is a useful tool to help surgeons perform accurately what surgeons want to do in order to better achieve their clinical objectives. Thus, it is important that the surgeon fully understands what he or she should be trying to achieve in THA for each patient.
MeSH Terms
Figure
-
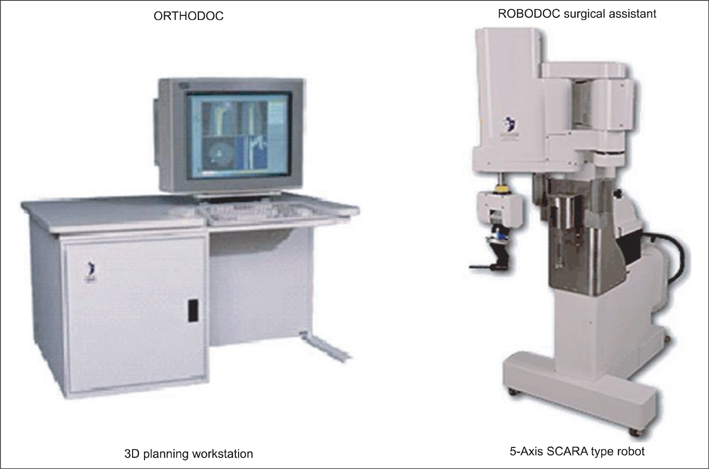
Fig. 1 The ROBODOC system including ORTHODOC, a 3-dimensional (3D) preoperative planning workstation, and ROBODOC surgical assistant, a 5-axis SACARA type surgical robot.

Fig. 2 Fiducial screws for registration. Before taking computed tomography images, these are inserted in the greater trochanter and the femoral condyles.
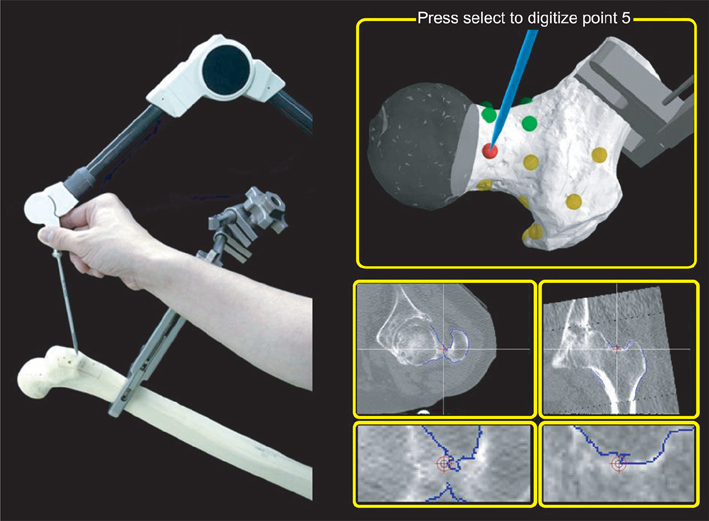
Fig. 3 Surface-based registration. Several femoral surface points are digitized with a probe to measure the position of the points.

Fig. 4 Optical 3-dimensional (3D) position sensor (Optotrak 3020). CCD: charged coupled device.
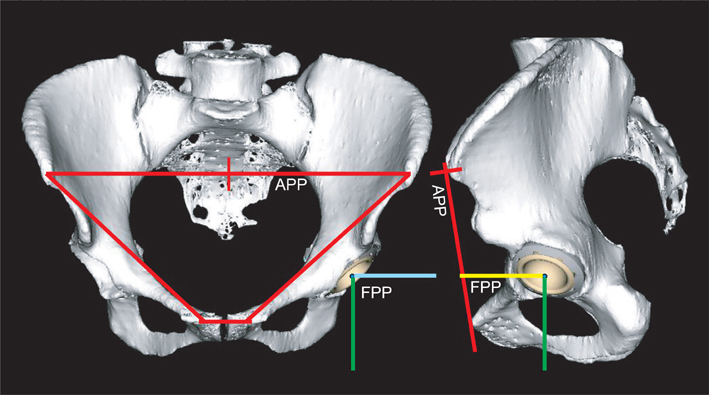
Fig. 5 Anterior pelvic plane (APP) and functional pelvic plane (FPP).
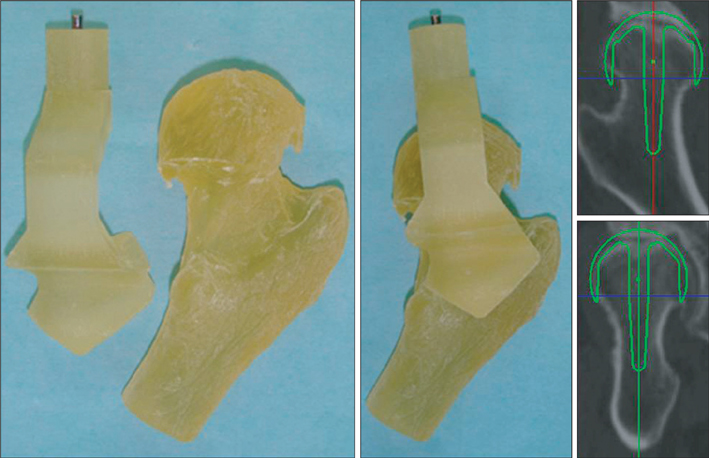
Fig. 6 Patient specific template for guide wire insertion in resurfacing hip arthroplasty.
Cited by 2 articles
-
The Evolution of Computer-Assisted Total Hip Arthroplasty and Relevant Applications
Jun-Dong Chang, In-Sung Kim, Atul M. Bhardwaj, Ramachandra N. Badami
Hip Pelvis. 2017;29(1):1-14. doi: 10.5371/hp.2017.29.1.1.Robotic Surgery in the Orthopedic Field
Woo-Suk Lee, Woo-Suk Jung
J Korean Orthop Assoc. 2018;53(6):459-465. doi: 10.4055/jkoa.2018.53.6.459.
Reference
-
1. Paul HA, Bargar WL, Mittlestadt B, et al. Development of a surgical robot for cementless total hip arthroplasty. Clin Orthop Relat Res. 1992. (285):57–66.
Article2. Bargar WL, Bauer A, Borner M. Primary and revision total hip replacement using the Robodoc system. Clin Orthop Relat Res. 1998. (354):82–91.
Article3. Haraguchi K, Sugano N, Nishii T, et al. Comparison of fit and fill between anatomic stem and straight tapered stem using virtual implantation on the ORTHODOC workstation. Comput Aided Surg. 2001. 6(5):290–296.
Article4. Simon DA, Lavallee S. Medical imaging and registration in computer assisted surgery. Clin Orthop Relat Res. 1998. (354):17–27.
Article5. Yao J, Taylor RH, Goldberg RP, et al. A C-arm fluoroscopy-guided progressive cut refinement strategy using a surgical robot. Comput Aided Surg. 2000. 5(6):373–390.
Article6. Nishihara S, Sugano N, Nishii T, et al. Clinical accuracy evaluation of femoral canal preparation using the ROBODOC system. J Orthop Sci. 2004. 9(5):452–461.
Article7. Nogler M, Maurer H, Wimmer C, Gegenhuber C, Bach C, Krismer M. Knee pain caused by a fiducial marker in the medial femoral condyle: a clinical and anatomic study of 20 cases. Acta Orthop Scand. 2001. 72(5):477–480.
Article8. Nakamura N, Sugano N, Nishii T, Miki H, Kakimoto A, Yamamura M. Robot-assisted primary cementless total hip arthroplasty using surface registration techniques: a short-term clinical report. Int J Comput Assist Radiol Surg. 2009. 4(2):157–162.
Article9. Takao M, Nishii T, Sakai T, Sugano N. Application of a CT-3D fluoroscopy matching navigation system to the pelvic and femoral regions. Comput Aided Surg. 2012. 17(2):69–76.
Article10. Taylor RH, Joskowicz L, Williamson B, et al. Computer-integrated revision total hip replacement surgery: concept and preliminary results. Med Image Anal. 1999. 3(3):301–319.
Article11. Nogler M, Krismer M, Haid C, Ogon M, Bach C, Wimmer C. Excessive heat generation during cutting of cement in the Robodoc hip-revision procedure. Acta Orthop Scand. 2001. 72(6):595–599.
Article12. Hagio K, Sugano N, Takashina M, Nishii T, Yoshikawa H, Ochi T. Effectiveness of the ROBODOC system in preventing intraoperative pulmonary embolism. Acta Orthop Scand. 2003. 74(3):264–269.
Article13. Nishihara S, Sugano N, Nishii T, Miki H, Nakamura N, Yoshikawa H. Comparison between hand rasping and robotic milling for stem implantation in cementless total hip arthroplasty. J Arthroplasty. 2006. 21(7):957–966.
Article14. Hananouchi T, Sugano N, Nishii T, et al. Effect of robotic milling on periprosthetic bone remodeling. J Orthop Res. 2007. 25(8):1062–1069.
Article15. Nakamura N, Sugano N, Nishii T, Kakimoto A, Miki H. A comparison between robotic-assisted and manual implantation of cementless total hip arthroplasty. Clin Orthop Relat Res. 2010. 468(4):1072–1081.
Article16. Thomsen MN, Breusch SJ, Aldinger PR, et al. Robotically-milled bone cavities: a comparison with hand-broaching in different types of cementless hip stems. Acta Orthop Scand. 2002. 73(4):379–385.17. Schneider J, Kalender W. Geometric accuracy in robot-assisted total hip replacement surgery. Comput Aided Surg. 2003. 8(3):135–145.
Article18. Honl M, Dierk O, Gauck C, et al. Comparison of robotic-assisted and manual implantation of a primary total hip replacement: a prospective study. J Bone Joint Surg Am. 2003. 85(8):1470–1478.
Article19. Bargar WL. Robots in orthopaedic surgery: past, present, and future. Clin Orthop Relat Res. 2007. 463:31–36.20. Bach CM, Winter P, Nogler M, Gobel G, Wimmer C, Ogon M. No functional impairment after Robodoc total hip arthroplasty: gait analysis in 25 patients. Acta Orthop Scand. 2002. 73(4):386–391.21. Schulz AP, Seide K, Queitsch C, et al. Results of total hip replacement using the Robodoc surgical assistant system: clinical outcome and evaluation of complications for 97 procedures. Int J Med Robot. 2007. 3(4):301–306.
Article22. Chun YS, Kim KI, Cho YJ, Kim YH, Yoo MC, Rhyu KH. Causes and patterns of aborting a robot-assisted arthroplasty. J Arthroplasty. 2011. 26(4):621–625.
Article23. Barrett AR, Davies BL, Gomes MP, et al. Computer-assisted hip resurfacing surgery using the acrobot navigation system. Proc Inst Mech Eng H. 2007. 221(7):773–785.
Article24. Dorr LD, Jones RE, Padgett DE, Pagnano M, Ranawat AS, Trousdale RT. Robotic guidance in total hip arthroplasty: the shape of things to come. Orthopedics. 2011. 34(9):e652–e655.
Article25. DiGioia AM, Jaramaz B, Blackwell M, et al. The Otto Aufranc Award: image guided navigation system to measure intraoperatively acetabular implant alignment. Clin Orthop Relat Res. 1998. (355):8–22.26. Nishihara S, Sugano N, Nishii T, Ohzono K, Yoshikawa H. Measurements of pelvic flexion angle using three-dimensional computed tomography. Clin Orthop Relat Res. 2003. (411):140–151.
Article27. Sugano N, Nishii T, Miki H, Yoshikawa H, Sato Y, Tamura S. Mid-term results of cementless total hip replacement using a ceramic-on-ceramic bearing with and without computer navigation. J Bone Joint Surg Br. 2007. 89(4):455–460.
Article28. Miki H, Yamanashi W, Nishii T, Sato Y, Yoshikawa H, Sugano N. Anatomic hip range of motion after implantation during total hip arthroplasty as measured by a navigation system. J Arthroplasty. 2007. 22(7):946–952.
Article29. Digioia AM 3rd, Jaramaz B, Plakseychuk AY, et al. Comparison of a mechanical acetabular alignment guide with computer placement of the socket. J Arthroplasty. 2002. 17(3):359–364.
Article30. DiGioia AM 3rd, Plakseychuk AY, Levison TJ, Jaramaz B. Mini-incision technique for total hip arthroplasty with navigation. J Arthroplasty. 2003. 18(2):123–128.
Article31. Sugano N, Takao M, Sakai T, Nishii T, Miki H, Nakamura N. Comparison of mini-incision total hip arthroplasty through an anterior approach and a posterior approach using navigation. Orthop Clin North Am. 2009. 40(3):365–370.
Article32. Miki H, Kyo T, Sugano N. Anatomical hip range of motion after implantation during total hip arthroplasty with a large change in pelvic inclination. J Arthroplasty. 2012. 27(9):1641–1650.e1.
Article33. Sugano N, Takao M, Sakai T, Nishii T, Miki H. Does CT-based navigation improve the long-term survival in ceramic-on-ceramic THA? Clin Orthop Relat Res. 2012. 470(11):3054–3059.
Article34. Kitada M, Nakamura N, Iwana D, Kakimoto A, Nishii T, Sugano N. Evaluation of the accuracy of computed tomography-based navigation for femoral stem orientation and leg length discrepancy. J Arthroplasty. 2011. 26(5):674–679.
Article35. Nogler M, Kessler O, Prassl A, et al. Reduced variability of acetabular cup positioning with use of an imageless navigation system. Clin Orthop Relat Res. 2004. (426):159–163.
Article36. Wixson RL, MacDonald MA. Total hip arthroplasty through a minimal posterior approach using imageless computer-assisted hip navigation. J Arthroplasty. 2005. 20:7 Suppl 3. 51–56.
Article37. Kalteis T, Handel M, Bathis H, Perlick L, Tingart M, Grifka J. Imageless navigation for insertion of the acetabular component in total hip arthroplasty: is it as accurate as CT-based navigation? J Bone Joint Surg Br. 2006. 88(2):163–167.38. Parratte S, Argenson JN. Validation and usefulness of a computer-assisted cup-positioning system in total hip arthroplasty: a prospective, randomized, controlled study. J Bone Joint Surg Am. 2007. 89(3):494–499.
Article39. Dorr LD, Malik A, Wan Z, Long WT, Harris M. Precision and bias of imageless computer navigation and surgeon estimates for acetabular component position. Clin Orthop Relat Res. 2007. 465:92–99.
Article40. Najarian BC, Kilgore JE, Markel DC. Evaluation of component positioning in primary total hip arthroplasty using an imageless navigation device compared with traditional methods. J Arthroplasty. 2009. 24(1):15–21.
Article41. Ohashi H, Matsuura M, Okamoto Y, Okajima Y. Intra- and intersurgeon variability in image-free navigation system for THA. Clin Orthop Relat Res. 2009. 467(9):2305–2309.
Article42. Ryan JA, Jamali AA, Bargar WL. Accuracy of computer navigation for acetabular component placement in THA. Clin Orthop Relat Res. 2010. 468(1):169–177.
Article43. Lin F, Lim D, Wixson RL, Milos S, Hendrix RW, Makhsous M. Limitations of imageless computer-assisted navigation for total hip arthroplasty. J Arthroplasty. 2011. 26(4):596–605.
Article44. Hohmann E, Bryant A, Tetsworth K. Anterior pelvic soft tissue thickness influences acetabular cup positioning with imageless navigation. J Arthroplasty. 2012. 27(6):945–952.
Article45. Stiehl JB, Heck DA, Jaramaz B, Amiot LP. Comparison of fluoroscopic and imageless registration in surgical navigation of the acetabular component. Comput Aided Surg. 2007. 12(2):116–124.
Article46. Romanowski JR, Swank ML. Imageless navigation in hip resurfacing: avoiding component malposition during the surgeon learning curve. J Bone Joint Surg Am. 2008. 90:Suppl 3. 65–70.
Article47. Schnurr C, Michael JW, Eysel P, Konig DP. Imageless navigation of hip resurfacing arthroplasty increases the implant accuracy. Int Orthop. 2009. 33(2):365–372.
Article48. Bailey C, Gul R, Falworth M, Zadow S, Oakeshott R. Component alignment in hip resurfacing using computer navigation. Clin Orthop Relat Res. 2009. 467(4):917–922.
Article49. Olsen M, Davis ET, Waddell JP, Schemitsch EH. Imageless computer navigation for placement of the femoral component in resurfacing arthroplasty of the hip. J Bone Joint Surg Br. 2009. 91(3):310–315.
Article50. Ganapathi M, Vendittoli PA, Lavigne M, Gunther KP. Femoral component positioning in hip resurfacing with and without navigation. Clin Orthop Relat Res. 2009. 467(5):1341–1347.
Article51. Cobb JP, Kannan V, Dandachli W, Iranpour F, Brust KU, Hart AJ. Learning how to resurface cam-type femoral heads with acceptable accuracy and precision: the role of computed tomography-based navigation. J Bone Joint Surg Am. 2008. 90:Suppl 3. 57–64.
Article52. Pitto RP, Malak S, Anderson IA. Accuracy of computer-assisted navigation for femoral head resurfacing decreases in hips with abnormal anatomy. Clin Orthop Relat Res. 2009. 467(9):2310–2317.
Article53. Radermacher K, Portheine F, Anton M, et al. Computer assisted orthopaedic surgery with image based individual templates. Clin Orthop Relat Res. 1998. (354):28–38.
Article54. Hananouchi T, Saito M, Koyama T, et al. Tailor-made surgical guide based on rapid prototyping technique for cup insertion in total hip arthroplasty. Int J Med Robot. 2009. 5(2):164–169.
Article55. Hananouchi T, Saito M, Koyama T, Sugano N, Yoshikawa H. Tailor-made surgical guide reduces incidence of outliers of cup placement. Clin Orthop Relat Res. 2010. 468(4):1088–1095.
Article56. Zhang YZ, Chen B, Lu S, et al. Preliminary application of computer-assisted patient-specific acetabular navigational template for total hip arthroplasty in adult single development dysplasia of the hip. Int J Med Robot. 2011. 7(4):469–474.
Article57. Kunz M, Rudan JF, Xenoyannis GL, Ellis RE. Computer-assisted hip resurfacing using individualized drill templates. J Arthroplasty. 2010. 25(4):600–606.
Article58. Audenaert E, De Smedt K, Gelaude F, Clijmans T, Pattyn C, Geebelen B. A custom-made guide for femoral component positioning in hip resurfacing arthroplasty: development and validation study. Comput Aided Surg. 2011. 16(6):304–309.
Article59. Steppacher SD, Kowal JH, Murphy SB. Improving cup positioning using a mechanical navigation instrument. Clin Orthop Relat Res. 2011. 469(2):423–428.
Article
- Full Text Links
-
- Actions
-
Cited
- CITED
-
- Close
- Share
-
- Similar articles
-
- Computer-Assisted Total Hip Arthroplasty
- Do You Need CAOS (Computer Assisted Orthopedic Surgery) in THA?: From a Negative Perspective
- The Evolution of Computer-Assisted Total Hip Arthroplasty and Relevant Applications
- The History of Total Hip Arthroplasty
- Computer Assisted Navigation in Knee Arthroplasty
